Auskonstruktion der Nema 34 Motorhalterung & Closed Loop Stepper
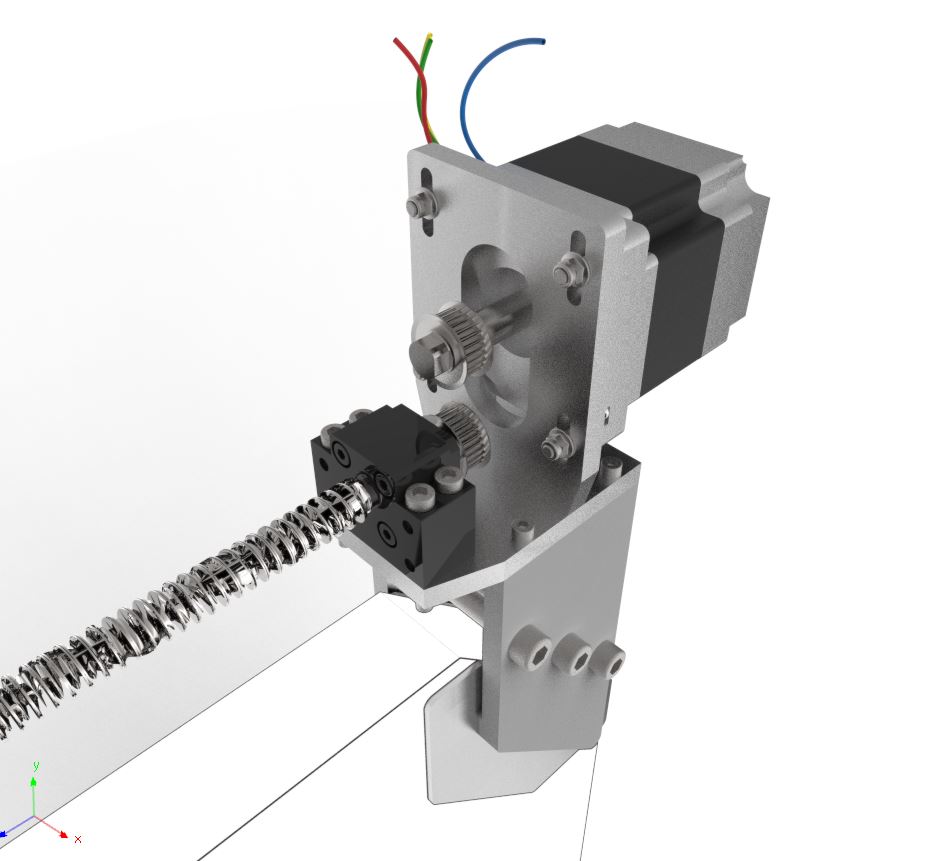
Die Motorhalterung für den Nema34 (4,5 Nm) mit der Klemmung wurde fertiggestellt und kann in die Fertigungsphase übergehen. Es wird nun ein Riemen verwendet um die Vibrationen des Schrittmotors nicht auf den Kugelgewindetrieb zu übertragen und andersrum ebenfalls. Auch werden die Schwingungen, die durch die Verfahrbewegungen hervorgerufen werden teilweise entkoppelt.
Weiterhin wurde festgestellt, dass die Klauenkupplung sehr stark quietscht. Die Übertragung mit dem Riemen zeigt sich als deutlich sanfter und ruhiger, wie z.B. an der Riemenübersetzung der X-Achse zu erkennen. Der Riemen ist auf der linken Abb. nicht dargestellt.

Da die Y-Achse mit den zwei zuvor verwendeten Nema23 (4 Amp/3Nm) bei 2000mm/min zum stalling neigt wurden zwei von den "CNC Hybrid Closed loop Stepper Servo Drive Driver 2HSS86H+ 4.5N.M Motor +Encoder" gekauft. Der Versand erfolgte laut Angaben aus Bremen und wurde sehr schnell geliefert. Die Verpackung war tadellos. Hoffentlich wird nun an der Y-Achse eine höhere Verfahrgeschwindigkeit möglich.

Edit: 25.02.2017: F6000


{kind=link}
Kommentare
Kommentar veröffentlichen