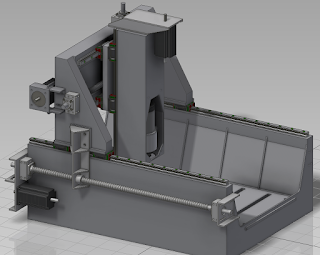
Die Herstellung einer eigenen CNC Fräse oder 3D Druckers ist der Traum eines jeden richtigen Handwerkers, Studenten und Hobbytreibers.Erfahren Sie wichtige Hinweise beim Kauf und der Herstellung. Das Besondere ist die kontinuierliche Weiterentwicklung der CNC Fräsentechnik und deren Einsatzgebiete.